���о��ˆT����3D��ӡ���g�ͷ����W�_�l�o��늳��ӵęCе���
2025��2��12�գ��ܵ������ĽY�����w�Є����W���l�����_ķʩ���ع��I��W�͵���˹�D-�_ɭ���ķ��Ɲ����(HZDR)���о��ˆT�_�l��һ�N�C���˳���@Щ���ͨ�^3D��ӡ���g���죬�o��늳ؼ����\�У��������һ�����ӏ���ϵ�y�Ԯa����Ч���\�ӡ��о��ˆT��ʾ���@Щ���ԙC���˿����ڭh���о����Ѿ��ЄӺ��t�����õ��I���ҵ����á�
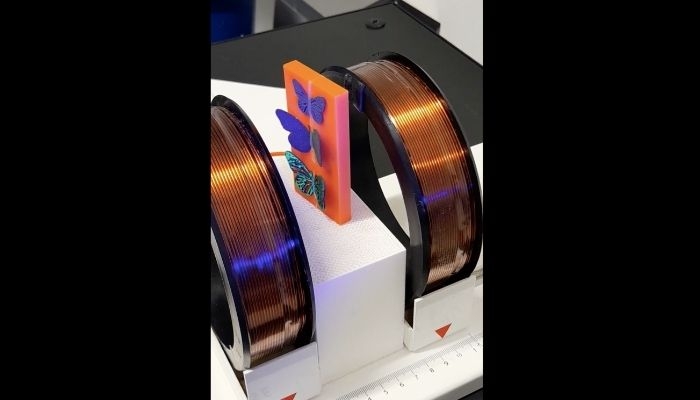
������֪���挍�����ij�H�����@�ˣ������w��Ч�ʘO�ߡ�������ÿ����ī����ͼ��ô�֮�g�M�Д�ǧӢ����w�㣬չ�F�˾�������͙CеЧ�ʣ��@���l���о��ˆT���`�С���������3D��ӡ���g�������@Щ�������ĽY���������������ɵ��µęC�����O���С��@Щ3D��ӡ�ęC���˙C�����ú���С�����w���ğ����Ծ۰����ͺϲ�������ģ�����¶�ڴň��Еr���C�����ĄӾ͕������
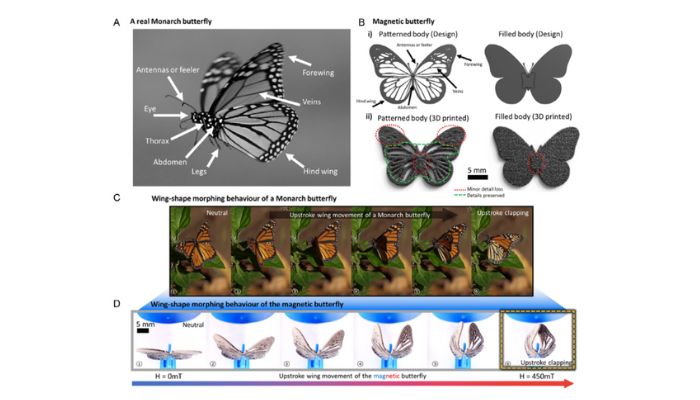
��Oliver Gutfleisch���ں�Denys Makarov��ʿ�I���ĈF�������12�����ģ�ͣ��@Щģ�Ͳ����˲�ͬ�ĽY������Ʒ�����У��ܵ������o�}�Y�����l���OӋ���F��ѡ��о��ˆTͨ�^����Ԫ����ģ�M�͌��u�����@Щ�D�����C���՚�����W�͙C���Ե�Ӱ푡��о��Y���l���ڡ����M����ϵ�y���ڿ��ϣ���ʾ�˾�������o�}�Y�����OӋ�܉��������ϵď��Ⱥ��m���ԣ�ͬ�r�����`���Բ��ܓp�������ˌ��F�@�N�OӋ�ď��ƣ��F�ʹ���˼����ĩ���ۺ�(L-PBF)���g�M��3D��ӡ��

3D��ӡ�������Щ���ڑ���
�@Щ���İlչ������I���_�����µĿ����ԡ��ڭh���о��У����������ڱO�y���Bϵ�y�����о��������x�NȺ���������;�Ԯ�΄��У������p���Ҹ�Ч���OӋ��ʹ̽����Ȼ�ĺ����y���M��ą^��ɞ���ܡ����⣬�������t�W�I���@헼��g�ɑ����������g���������_�l����׃�����������켡������ܲ��ϡ�
Ŀǰ���@Щ����������R�Ŀ����y�}����Ҫ�ⲿ�ň����ṩ�������о��Ĺ�ͬ����Muhammad Bilal Khanָ����“δ���Ĺ������Լ����ڼ��ɸ�����ʹň��l�����ͷ������ƣ��Ԍ��F�����\�С�”�о��F�߀��̽���²��ԣ�ͨ�^�{���ň��ď��Ⱥͷ���탞���\�ӿ��ƺ;��_�ȡ�
�@Щ�C�������_�l�����˷����C���˼��g��һ��ͻ�ơ�ͬ�r��3D��ӡ���gչʾ���ڄ����܉�ģ������ϵ�yЧ�ʺ��m���ԵĹ������O�䷽��ľ������S��δ�����g�ĸ��M���������ص�׃�ĭh���O�y�������t���ȶ����I��đ��á�
(؟�ξ���admin)
 ��ʡ�����WԺ�о��ˆT�_�l
��ʡ�����WԺ�о��ˆT�_�l Luyten���ڰĴ������O�˚�
Luyten���ڰĴ������O�˚� Hassell��̹ɣ�၆������
Hassell��̹ɣ�၆������ ů�ģ���W����3D��ӡ���g
ů�ģ���W����3D��ӡ���g 3D��ӡ�νM�����������о�
3D��ӡ�νM�����������о�- ����ʡ�����WԺ�о��ˆT�_�l����ȫ3D��ӡ
- �����о��ˆT����3D��ӡ���g�ͷ����W�_
- ��Luyten���ڰĴ������O�˚���н����ח�
- ��Hassell��̹ɣ�၆�����µ�3D��ӡ��^
- ��ů�ģ���W����3D��ӡ���g��˾ˡ��족
- ��3D��ӡ�νM�����������о��ж����W����
- �����ZTwingo E-Tech늄�ԭ��܇��3D��ӡ
- ��FABRX�_��3D��ӡ�C�Ԅӹ��b��2.5�����z
- ��Ӣ���ʼҿ�܊����3D��ӡ���g�����F�f��
- ����30��犃ȴ�ӡ�����Y��һ���մ�������
 3D��ӡ���F��̶�
3D��ӡ���F��̶� �炐�ȁ���W����
�炐�ȁ���W���� ʧȥ1/3����,���
ʧȥ1/3����,��� 3D��ӡܛƤ�|����
3D��ӡܛƤ�|���� 3D��ӡ��Q������
3D��ӡ��Q������ ���ܲ����¡����T
���ܲ����¡����T- ��3D��ӡ��������3D��ӡ�P���������ij���
- ����3D��ӡ�C�����b���ˣ�����3d��ӡ��һ
- ���Լ�������һ�_ֻ��20��Ԫ��3D��ӡ��
- ���P�c3D��ӡ���ޏ�������E�еĽ��䰸��
- ���֙C��ע���ˣ��Ø�ݮ��+3D��ӡ�C����
- ���D�⣺3D��ӡ�������a����
- ��SOLS��˾�l���ɶ��Ƶ�3D��ӡ�C��Ь�|
- ��ӯ��3D��ӡ�������䰸������
- ��10�����ص�3D��ӡ���裬����һ������ϲ
- ��3D��ӡ���҃��b�đ��ã��cȼ�㌦���g


